ESP32 adalah papan mikrokontroler berbasis IoT yang dapat digunakan untuk menghubungkan, mengontrol, dan membaca berbagai sensor. PIR atau sensor gerak adalah salah satu perangkat yang dapat kita antarmuka dengan ESP32 untuk mendeteksi pergerakan suatu objek dalam jangkauan sensor gerak menggunakan ESP32.
Sebelum kita mulai menghubungkan ESP32 dengan sensor PIR, kita harus mengetahui cara kerja interupsi dan cara membaca serta menanganinya di ESP32. Selanjutnya kita harus memahami konsep inti dari fungsi delay() dan millis() dalam pemrograman ESP32.
Mari kita bahas cara kerja PIR dengan ESP32 secara detail.
Berikut adalah isi dari artikel ini:
1: Apakah Interupsi
Sebagian besar peristiwa yang terjadi dalam pemrograman ESP32 berjalan secara berurutan yang berarti eksekusi kode baris demi baris. Untuk menangani dan mengontrol kejadian yang tidak perlu dijalankan selama eksekusi kode secara berurutan Menyela digunakan.
Misalnya, jika kita ingin menjalankan tugas tertentu ketika terjadi peristiwa khusus, atau sinyal pemicu diberikan ke pin digital mikrokontroler, kita menggunakan interupsi.
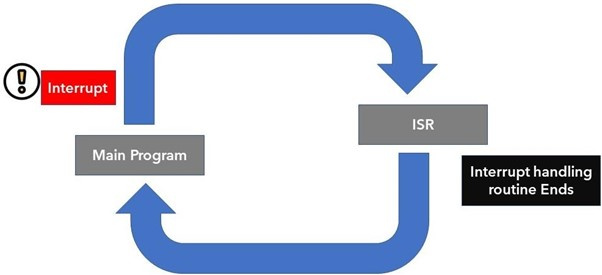
Dengan interupsi kita tidak perlu terus-menerus memeriksa status digital pin input ESP32. Ketika interupsi terjadi, prosesor menghentikan program utama dan fungsi baru dipanggil yang dikenal sebagai ISR ( Interupsi Rutin Layanan ). Ini ISR fungsi menangani interupsi yang disebabkan setelah itu kembali ke program utama dan mulai menjalankannya. Salah satu contoh ISR adalah sensor gerak PIR yang menghasilkan interupsi setelah gerakan terdeteksi .
1.1: Menginterupsi Pin di ESP32
Interupsi eksternal atau perangkat keras dapat disebabkan oleh modul perangkat keras seperti sensor sentuh atau tombol tekan. Interupsi sentuh terjadi saat sentuhan terdeteksi pada pin ESP32 atau interupsi GPIO juga dapat digunakan saat tombol atau tombol tekan ditekan.
Pada artikel ini kami akan memicu interupsi ketika gerakan terdeteksi menggunakan sensor PIR dengan ESP32.
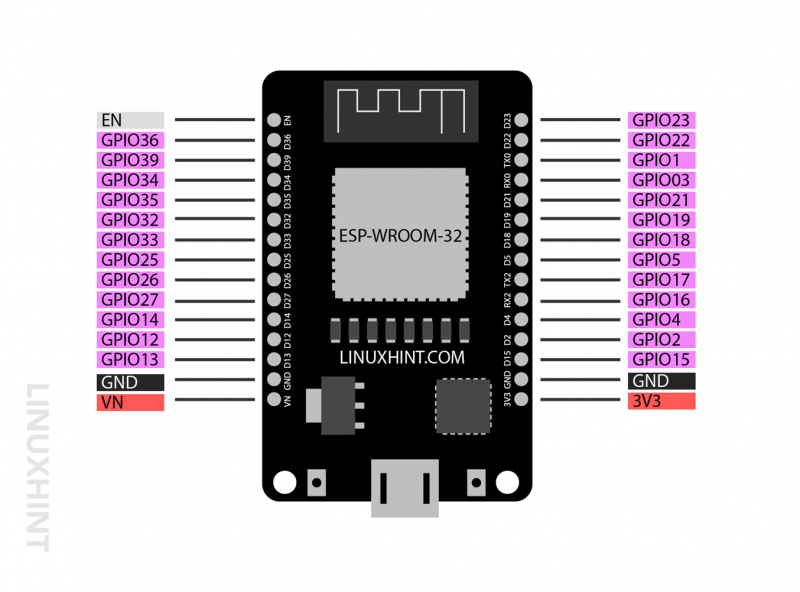
Hampir semua pin GPIO kecuali 6 pin terintegrasi SPI yang biasanya disertakan 36 -pin versi papan ESP32 tidak dapat digunakan untuk tujuan panggilan interupsi. Jadi, untuk menerima interupsi eksternal berikut adalah pin yang disorot dalam warna ungu yang dapat digunakan di ESP32:
Gambar ini adalah ESP32 30 pin.
1.2: Memanggil Interupsi di ESP32
Untuk penggunaan interupsi di ESP32 bisa kita panggil attachInterrupt() fungsi.
Fungsi ini menerima tiga argumen berikut:
-
- Pin GPIO
- Fungsi yang akan dieksekusi
- Mode
1: GPIO pin adalah argumen pertama yang dipanggil di dalam attachInterrupt() fungsi. Misalnya untuk menggunakan pin digital 12 sebagai sumber interupsi kita bisa menyebutnya using digitalPinToInterrupt(12) fungsi.
2: Fungsi yang akan dieksekusi adalah program yang dieksekusi setiap kali interupsi tercapai atau dipicu oleh sumber eksternal atau internal. Itu bisa berupa kedipan LED atau menyalakan alarm kebakaran.
3: Modus adalah argumen ketiga dan terakhir yang dibutuhkan fungsi interupsi. Ini menjelaskan kapan harus memicu interupsi. Berikut adalah mode yang dapat digunakan:
-
- Rendah: Picu interupsi setiap kali pin GPIO yang ditentukan rendah.
- Tinggi: Picu interupsi setiap kali pin GPIO yang ditentukan tinggi.
- Mengubah: Memicu interupsi setiap kali pin GPIO mengubah nilainya dari tinggi ke rendah atau sebaliknya.
- Jatuh: Ini adalah mode untuk memicu interupsi ketika pin tertentu mulai turun dari kondisi tinggi ke rendah.
- Kenaikan: Ini adalah mode untuk memicu interupsi ketika pin tertentu mulai naik dari kondisi rendah ke tinggi.
Hari ini kita akan menggunakan Kenaikan mode sebagai argumen ketiga untuk fungsi interupsi setiap kali sensor PIR mendeteksi LED interupsi atau sensor akan menyala karena beralih dari kondisi rendah ke tinggi.
2: Timer dalam Pemrograman ESP32
Timer dalam pemrograman mikrokontroler memainkan peran penting untuk mengeksekusi instruksi untuk periode waktu tertentu atau pada waktu tertentu.
Dua fungsi utama yang biasa digunakan untuk memicu output adalah menunda() dan mili() . Perbedaan antara keduanya karena fungsi delay() menghentikan sisa program setelah mulai dijalankan sementara millis() berjalan selama jangka waktu yang ditentukan, lalu program kembali ke fungsi utama.
Di sini kami akan menggunakan LED dengan sensor PIR dan kami tidak ingin menyalakannya terus menerus setelah pemicu interupsi. Kami akan menggunakan fungsi millis() yang memungkinkan kami untuk menyalakannya untuk beberapa waktu yang ditentukan dan kemudian kembali ke program asli setelah stempel waktu berlalu.
2.1: delay() Fungsi
fungsi delay() cukup sederhana hanya membutuhkan satu argumen yaitu MS dari tipe data panjang yang tidak ditandatangani. Argumen ini mewakili waktu dalam milidetik kami ingin menghentikan sementara program hingga pindah ke baris berikutnya.
Misalnya, fungsi berikut akan menghentikan program untuk 1 detik .
menunda ( 1000 )
delay() adalah sejenis fungsi pemblokiran untuk pemrograman mikrokontroler. delay() memblokir sisa kode untuk dieksekusi hingga waktu fungsi khusus ini tidak selesai. Jika kita ingin mengeksekusi beberapa instruksi, kita harus menghindari penggunaan fungsi delay sebagai gantinya kita dapat menggunakan millis atau modul RTC pengatur waktu eksternal.
2.2: fungsi millis()
millis() mengembalikan jumlah milidetik yang berlalu sejak papan ESP32 mulai menjalankan program saat ini. Dengan menulis beberapa baris kode, kita dapat dengan mudah menghitung waktu sekarang kapan saja saat menjalankan kode ESP32.
millis banyak digunakan di mana kita perlu menjalankan banyak tugas tanpa memblokir kode lainnya. Berikut adalah sintaks dari fungsi millis yang digunakan untuk menghitung berapa lama waktu berlalu sehingga kita dapat menjalankan instruksi tertentu.
jika ( CurrentMillis - sebelumnyaMillis > = interval ) {sebelumnyaMillis = CurrentMillis;
}
Kode ini mengurangi millis() sebelumnya dari millis() saat ini jika waktu yang dikurangi sama dengan menentukan interval instruksi tertentu akan dieksekusi. Katakanlah kita ingin mengedipkan LED selama 10 detik. Setelah setiap 5 menit kita dapat mengatur interval waktu sama dengan 5 menit (300000ms). Kode akan memeriksa interval setiap kali kode berjalan, setelah mencapai itu akan berkedip LED selama 10 detik.
Catatan: Di sini kita akan menggunakan fungsi millis() untuk menghubungkan ESP32 dengan sensor PIR. Alasan utama di balik penggunaan mili dan bukan penundaan adalah karena fungsi millis() tidak memblokir kode seperti yang dilakukan fungsi penundaan(). Jadi, begitu PIR mendeteksi gerakan, interupsi akan dihasilkan. Menggunakan fungsi millis() interupsi akan memicu LED untuk waktu yang ditentukan setelah itu jika gerakan dihentikan fungsi millis() akan mengatur ulang dan menunggu interupsi berikutnya.
Jika kita menggunakan fungsi delay() itu akan sepenuhnya memblokir kode dan interupsi apa pun yang disebabkan tidak akan dibaca oleh ESP32 yang mengakibatkan kegagalan proyek.
3: Menghubungkan Sensor PIR dengan ESP32
Di sini kita akan menggunakan fungsi millis() dalam kode Arduino IDE karena kita ingin memicu LED setiap kali sensor PIR mendeteksi beberapa gerakan. LED ini akan menyala selama waktu yang ditentukan setelah itu akan kembali ke kondisi normal.
Berikut adalah daftar komponen yang akan kami butuhkan:
-
- Papan pengembangan ESP32
- Sensor gerak PIR (HC-SR501)
- DIPIMPIN
- Resistor 330 Ohm
- Menghubungkan kabel
- Papan tempat memotong roti
Skema untuk sensor PIR dengan ESP32:
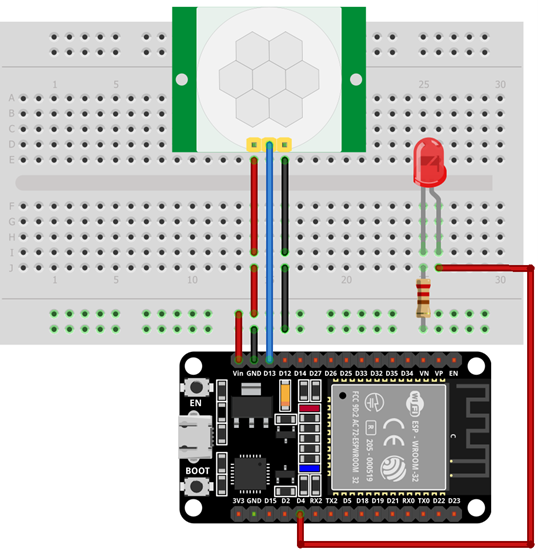
Sambungan pin ESP32 dengan sensor PIR adalah:
| ESP32 | Sensor PIR |
| datang | Vcc |
| GPIO13 | KELUAR |
| GND | GND |
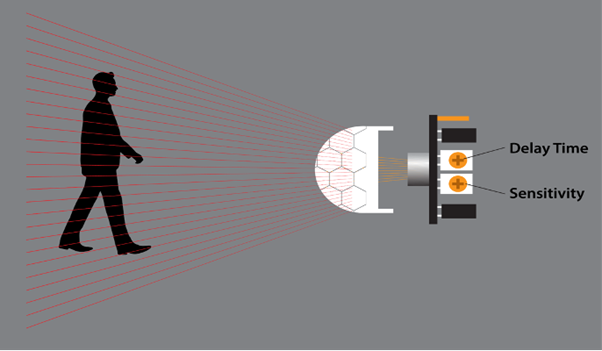
3.1: Sensor Gerak PIR (HC-SR501)
PIR adalah singkatan dari sensor infra merah pasif . Ia menggunakan sepasang sensor piroelektrik yang mendeteksi panas di sekitarnya. Kedua sensor piroelektrik ini terletak satu demi satu dan ketika suatu objek masuk dalam jangkauannya, perubahan energi panas atau perbedaan sinyal antara kedua sensor ini menyebabkan keluaran sensor PIR menjadi RENDAH. Setelah pin keluar PIR menjadi RENDAH, kita dapat mengatur instruksi khusus untuk dieksekusi.
Berikut adalah karakteristik sensor PIR:
-
- Sensitivitas dapat diatur tergantung pada lokasi proyek (seperti merasakan gerakan mouse atau daun).
- Sensor PIR dapat diatur berapa lama mendeteksi objek.
- Banyak digunakan dalam alarm keamanan rumah dan aplikasi deteksi gerakan berbasis termal lainnya.
3.2: Pinout HC-SR501
PIR HC-SR501 hadir dengan tiga pin. Dua di antaranya adalah pin daya untuk Vcc dan GND dan satu pin keluaran untuk sinyal pemicu.
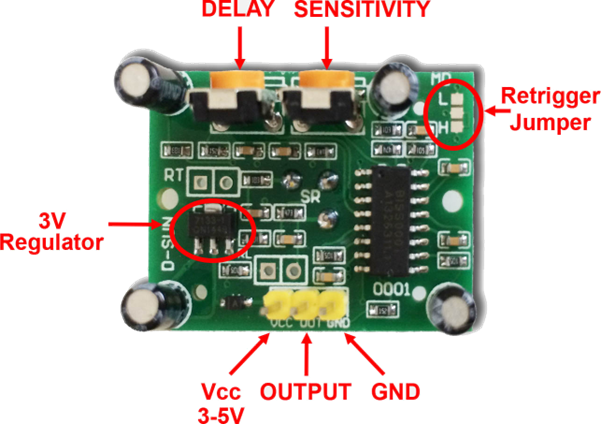
Berikut penjelasan pin sensor PIR :
| Pin | Nama | Keterangan |
| 1 | Vcc | Pin input untuk sensor Hubungkan ke ESP32 Vin Pin |
| dua | KELUAR | Keluaran Sensor |
| 3 | GND | Sensor GND |
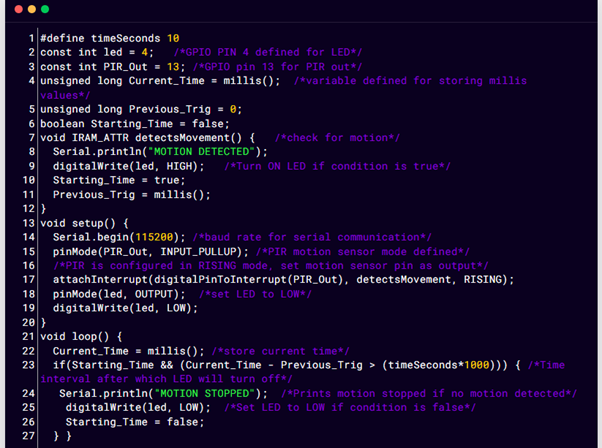
3.3: Kode
Sekarang untuk memprogram ESP32, tulis kode yang diberikan di editor Arduino IDE dan unggah ke ESP32.
#menentukan waktu Detik 10konstanta int dipimpin = 4 ; /* PIN GPIO 4 didefinisikan untuk DIPIMPIN */
cons int PIR_Out = 13 ; /* Pin GPIO 13 untuk PIR keluar */
unsigned long Current_Time = millis ( ) ; /* variabel didefinisikan untuk menyimpan nilai millis */
unsigned long Sebelumnya_Trig = 0 ;
boolean Waktu_Mulai = Salah ;
batal IRAM_ATTR mendeteksi Gerakan ( ) { /* memeriksa untuk gerakan */
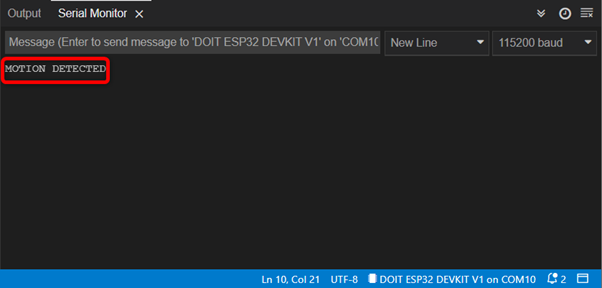
Serial.println ( 'GERAKAN TERDETEKSI' ) ;
digitalWrite ( dipimpin, TINGGI ) ; /* Nyalakan LED jika kondisi adalah BENAR */
Waktu_Mulai = BENAR ;
Previous_Trig = mili ( ) ;
}
pengaturan batal ( ) {
Serial.mulai ( 115200 ) ; /* tingkat baud untuk komunikasi serial */
pinMode ( PIR_Keluar, INPUT_PULLUP ) ; /* Mode sensor gerak PIR ditentukan */
/* PIR dikonfigurasi di modus NAIK, mengatur jarum sensor gerak sebagai keluaran */
attachInterrupt ( digitalPinToInterrupt ( PIR_Keluar ) , mendeteksiPergerakan, BANGKIT ) ;
pinMode ( dipimpin, KELUARAN ) ; /* mengatur LED ke RENDAH */
digitalWrite ( dipimpin, RENDAH ) ;
}
lingkaran kosong ( ) {
Current_Time = mili ( ) ; /* menyimpan arus waktu */
jika ( Waktu mulai && ( Current_Time - Prev_Trig > ( waktuDetik * 1000 ) ) ) { /* Interval waktu setelah yang LED akan mati */
Serial.println ( 'GERAKAN BERHENTI' ) ; /* Gerakan cetakan berhenti jika tidak ada gerakan yang terdeteksi */
digitalWrite ( dipimpin, RENDAH ) ; /* Atur LED ke RENDAH jika kondisi adalah Salah */
Waktu_Mulai = Salah ;
}
}
Kode dimulai dengan mendefinisikan pin GPIO untuk keluaran LED dan PIR. Selanjutnya, kami membuat tiga variabel berbeda yang akan membantu menyalakan LED saat gerakan terdeteksi.
Ketiga Variabel ini adalah Saat_Waktu, Trik_Sebelumnya, dan Waktu mulai. Variabel-variabel ini akan menyimpan waktu saat ini, waktu di mana gerakan terdeteksi dan pengatur waktu setelah gerakan terdeteksi.
Di bagian pengaturan pertama, kami mendefinisikan baud rate serial untuk komunikasi. Selanjutnya menggunakan pinMode() atur sensor gerak PIR sebagai INPUT PULLUP. Untuk mengatur interupsi PIR attachInterrupt() dijelaskan. GPIO 13 dijelaskan untuk mendeteksi pergerakan pada mode RISING.
Selanjutnya di bagian loop() dari kode, menggunakan fungsi millis() kita menyalakan dan mematikan LED saat pemicu tercapai.
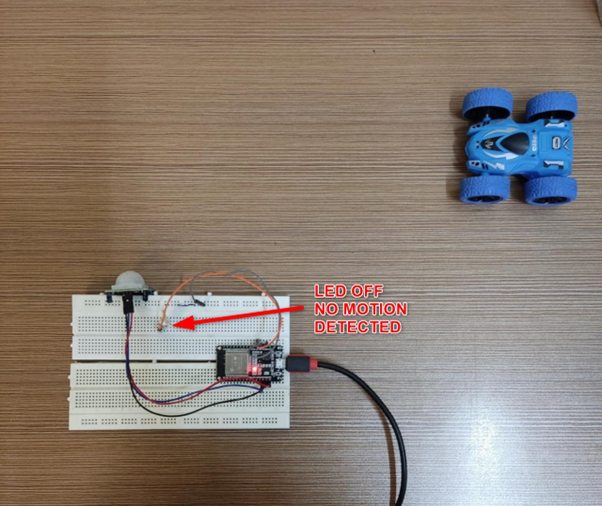
3.4: Keluaran
Pada bagian output kita dapat melihat objek berada di luar jangkauan sensor PIR, sehingga DIPIMPIN diputar MATI .
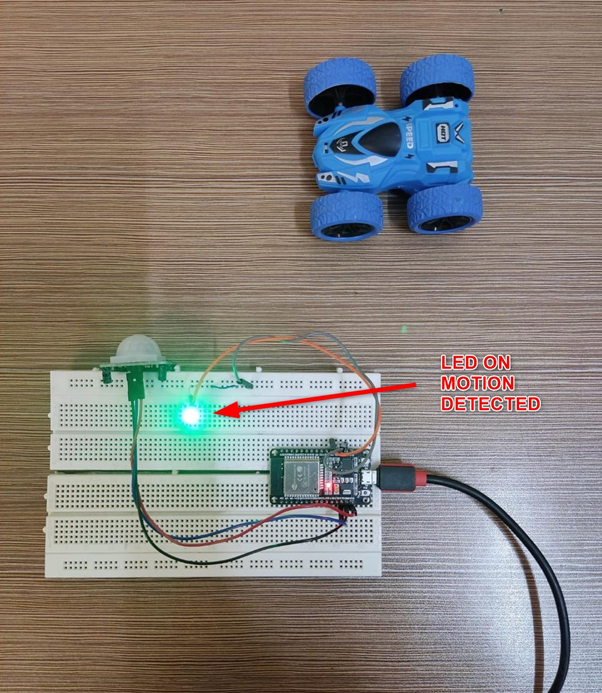
Sekarang gerakan yang terdeteksi oleh LED sensor PIR akan menyala PADA untuk 10 detik setelah itu jika tidak ada gerakan yang terdeteksi maka akan tetap ada MATI sampai pemicu berikutnya diterima.
Output berikut ditunjukkan oleh monitor serial di Arduino IDE.
Kesimpulan
Sensor PIR dengan ESP32 dapat membantu mendeteksi gerakan objek yang melewati jangkauannya. Menggunakan fungsi interupsi dalam pemrograman ESP32 kita dapat memicu respons pada beberapa pin GPIO tertentu. Ketika perubahan terdeteksi, fungsi interupsi akan dipicu dan LED akan menyala.